
 English
English Deutsch
Deutsch italiano
italiano 中文简体
中文简体
Autore: Ammin Data: 2025-12-11
Qual è la differenza tra motoriduttori CA e motoriduttori CC?
Contenuto
- 1 Introduzione: Perché la distinzione è importante
- 2 Principi elettrici e meccanici di base
- 3 Caratteristiche di coppia, velocità e prestazioni
- 4 Sistemi di controllo ed elettronica
- 5 Efficienza, calore e consumo energetico
- 6 Affidabilità, manutenzione e durata
- 7 Idoneità dell'applicazione ed esempi di settore
- 8 Guida alla selezione: come scegliere tra motoriduttori CA e CC
- 9 Installazione, errori comuni e risoluzione dei problemi
- 10 Considerazioni sui costi e costo totale di proprietà (TCO)
- 11 Raccomandazioni pratiche e lista di controllo finale
- 12 Conclusione
Introduzione: Perché la distinzione è importante
Scegliere tra un Motoriduttore CA inoltre, un motoriduttore CC è molto più che una questione di preferenze elettriche: influisce sulle prestazioni del sistema, sulla complessità del controllo, sui costi del ciclo di vita e sull'idoneità per applicazioni specifiche. Questo articolo fornisce un confronto pratico, tecnico e incentrato sulle applicazioni per aiutare ingegneri, tecnici e acquirenti a prendere decisioni informate. Esaminiamo i principi elettrici, l'architettura meccanica, il comportamento di coppia e velocità, le opzioni di controllo e guida, l'efficienza, la manutenzione e le regole di selezione del mondo reale.
Principi elettrici e meccanici di base
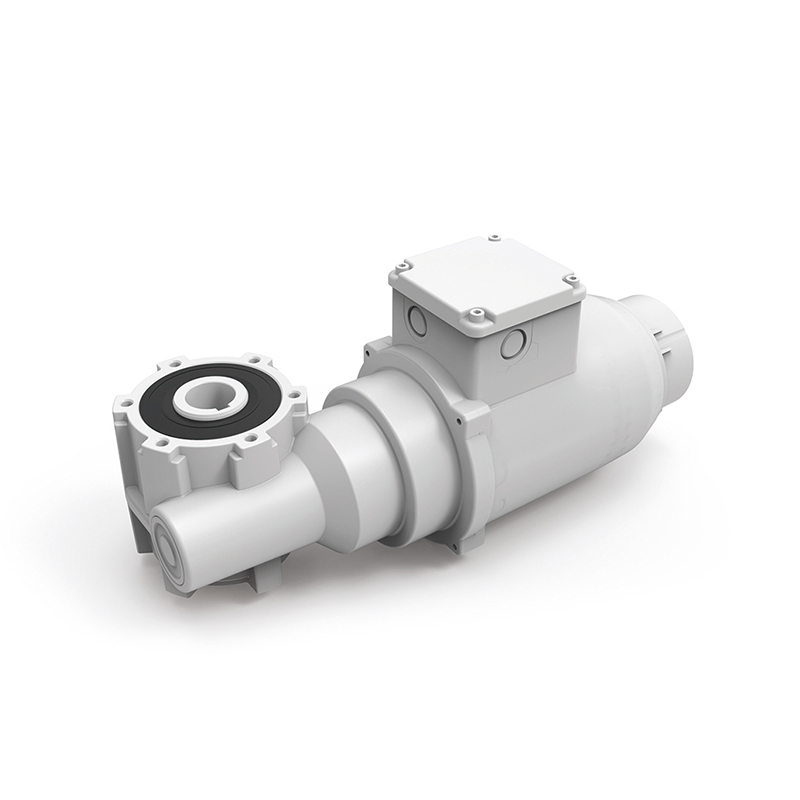
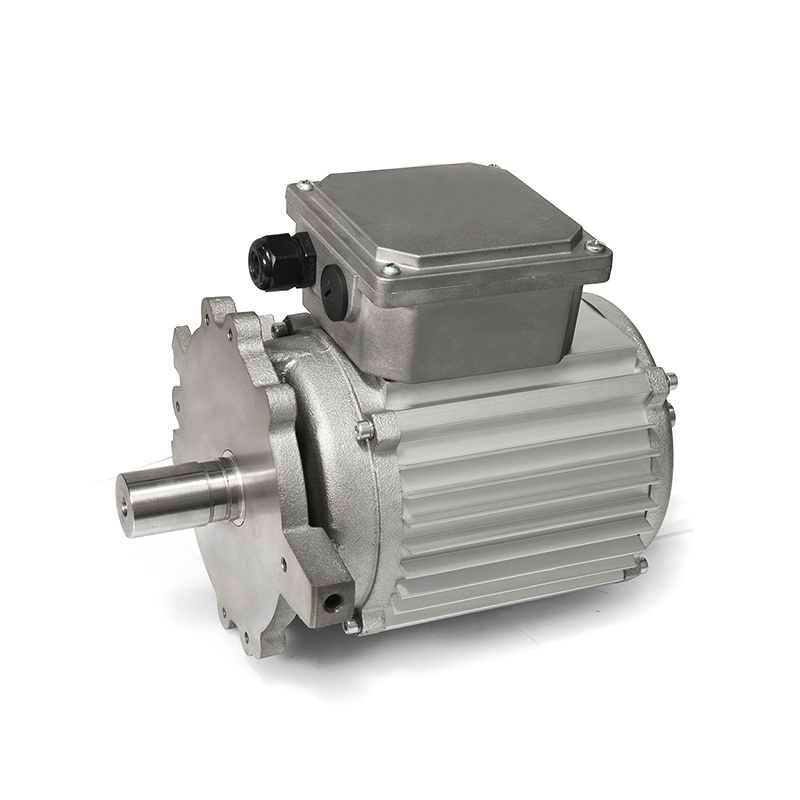
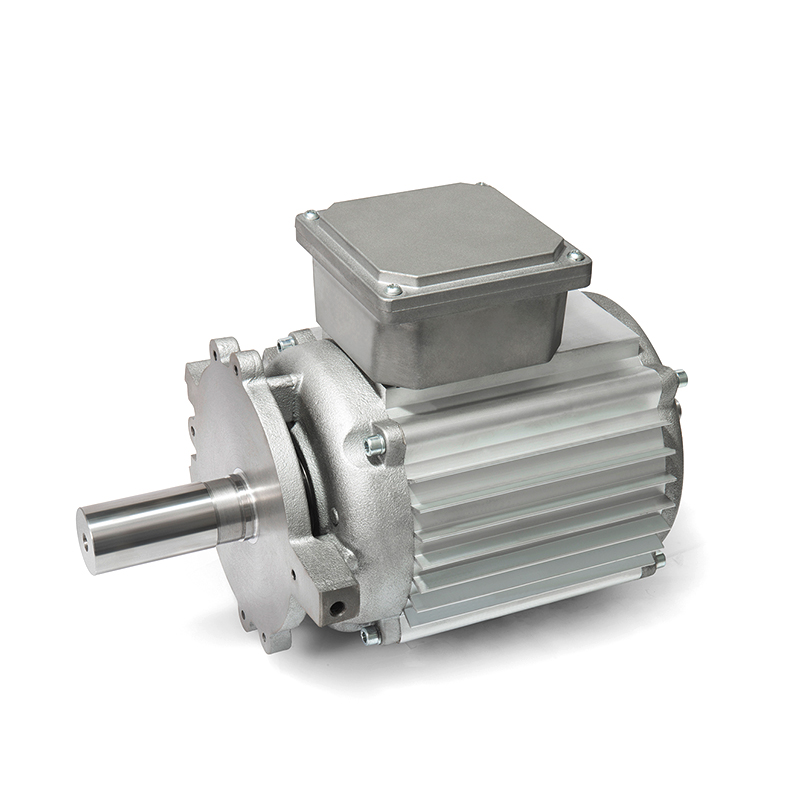
I motoriduttori CA sono azionati da corrente alternata e in genere accoppiano un motore a induzione CA o sincrono con un riduttore. Sfruttano la natura a frequenza fissa dell'alimentazione di rete o dell'alimentazione a frequenza convertita (tramite VFD) per produrre movimento rotatorio. I motoriduttori CC, al contrario, utilizzano corrente continua e sono comunemente costruiti con varianti di motore CC con spazzole o CC senza spazzole (BLDC) accoppiate a un riduttore. L'architettura DC rende intrinsecamente più semplice il controllo della coppia e il funzionamento a bassa velocità senza conversione di frequenza.
Differenze costruttive
Meccanicamente, entrambi i tipi di motore condividono il design del riduttore - a denti cilindrici, elicoidali, a vite senza fine, planetario - ma differiscono nelle parti interne del motore: i motori CA utilizzano avvolgimenti e spesso un rotore a gabbia di scoiattolo o magneti permanenti (nei tipi sincroni), mentre i motori CC utilizzano armature con commutatori (spazzolati) o commutazione elettronica (BLDC). La presenza o l'assenza di spazzole influisce sulla manutenzione, sul rumore elettrico e sulla durata.
Caratteristiche di coppia, velocità e prestazioni
L'erogazione della coppia e il comportamento della velocità sono i principali differenziatori. I motori CC forniscono un'elevata coppia di avviamento e un rapporto coppia-corrente quasi lineare, che li rende facili da controllare per attività a bassa velocità e coppia elevata. I motori CA, in particolare i motori a induzione, solitamente producono una coppia di avviamento inferiore a meno che non siano progettati specificamente per tale scopo; tuttavia, se abbinati a un cambio e a un VFD, possono raggiungere profili precisi di velocità e coppia in un'ampia gamma.
Controllo della velocità e risposta dinamica
I motoriduttori CC offrono una risposta di coppia immediata con un semplice controllo della tensione o PWM. I tipi BLDC, combinati con i controller elettronici, forniscono un'eccellente risposta dinamica e un'elevata efficienza. I motoriduttori CA richiedono un inverter o un azionamento a frequenza variabile (VFD) per un funzionamento regolare a velocità variabile; i moderni VFD offrono un controllo preciso ma aggiungono complessità al sistema, costi e la necessità di un filtraggio appropriato per prevenire interferenze elettriche.
Sistemi di controllo ed elettronica
La complessità del controllo differisce notevolmente: i motori CC possono spesso essere controllati con driver relativamente semplici (regolatori di tensione, controller PWM), rendendoli la soluzione ideale quando è necessario un controllo rapido e a basso costo. I motori CA si affidano al controllo di frequenza e tensione per la regolazione della velocità; questo significa un'unità esterna (VFD) che sintetizza CA a frequenza variabile. Per il controllo del movimento di precisione, entrambi i sistemi possono utilizzare encoder a circuito chiuso, ma i sistemi CA comunemente si integrano con l'automazione industriale tramite VFD e PLC.
Rigenerazione e frenata
I motori CC (in particolare BLDC) e i servosistemi CA possono entrambi supportare la frenatura rigenerativa, restituendo energia all'alimentazione con azionamenti adeguati. I semplici sistemi CC con spazzole solitamente dissipano l'energia di frenatura sotto forma di calore a meno che non siano dotati di elettronica rigenerativa. I sistemi CA dotati di VFD possono richiedere unità con capacità rigenerativa e hardware di gestione del bus CC per catturare l'energia restituita, aumentando la complessità iniziale ma consentendo un risparmio energetico nelle applicazioni cicliche.
Efficienza, calore e consumo energetico
L'efficienza dipende dalla topologia del motore, dalla velocità, dal carico e dalle perdite del riduttore. I moderni motori a induzione CA sono altamente efficienti a velocità e carichi nominali o quasi, mentre i motori sincroni a magneti permanenti forniscono un'efficienza eccellente su tutte le gamme. I motori BLDC offrono in genere elevate efficienze di picco e un comportamento favorevole a carico parziale. Anche la scelta del riduttore (elicoidale o a vite senza fine) influisce materialmente sull’efficienza del sistema; Gli ingranaggi a vite senza fine spesso introducono perdite più elevate nella fase di trasmissione, indipendentemente dal tipo di motore.
Affidabilità, manutenzione e durata
Le esigenze di manutenzione divergono principalmente a causa di spazzole, cuscinetti e azionamenti elettronici. I motoriduttori CC con spazzole richiedono la sostituzione periodica delle spazzole e la manutenzione del commutatore, aumentando la manutenzione programmata. I motori DC e AC senza spazzole eliminano le spazzole, riducendo i punti di usura meccanica. Tuttavia, i sistemi CA con VFD introducono componenti elettronici sensibili a picchi di calore e tensione, che richiedono raffreddamento e mitigazione delle armoniche. L'analisi dei costi del ciclo di vita dovrebbe includere il tempo medio tra i guasti (MTBF) del motore, l'affidabilità dell'elettronica di comando e gli intervalli di manutenzione del cambio.
Idoneità dell'applicazione ed esempi di settore
- Motoriduttori CA: preferiti in applicazioni industriali a servizio continuo, alimentate dalla rete elettrica, come trasportatori, pompe, serrande HVAC e macchinari pesanti in cui sono importanti velocità stabili e struttura robusta.
- Motoriduttori CC: preferiti in applicazioni alimentate a batteria, mobili o di precisione a bassa velocità come robotica, veicoli elettrici, imballaggi automatizzati e attività che richiedono un'elevata coppia di avviamento.
- Casi d'uso ibridi: molti sistemi combinano entrambi: apparecchiature della linea principale azionate da CA con attuatori CC o BLDC per il posizionamento di precisione o attrezzi mobili.
Guida alla selezione: come scegliere tra motoriduttori CA e CC
La scelta del motore giusto dipende da criteri quali fonte di alimentazione (rete o batteria), precisione di controllo richiesta, coppia di avviamento, ciclo di lavoro, condizioni ambientali, obiettivi di costo del ciclo di vita e vincoli di spazio. Di seguito è riportata una tabella comparativa compatta per facilitare decisioni rapide.
| Parametro | Motoriduttore CA | Motoriduttore CC |
| Fonte di energia | Rete (monofase/trifase) | Alimentazione a batteria o CC |
| Coppia di avviamento | Moderato (meglio con VFD) | Alto (soprattutto serie DC/BLDC) |
| Controllo della velocità | Richiede VFD per velocità variabile | Semplice con driver di tensione/PWM |
| Manutenzione | Meccanica bassa, ma elettronica di guida | Senza spazzole: basso; Spazzolato: maggiore manutenzione |
| Usi tipici | Trasportatori, pompe, HVAC, miscelatori | Robotica, veicoli elettrici, attuatori, dispositivi portatili |
Installazione, errori comuni e risoluzione dei problemi
- Garantire la corretta corrispondenza tra il rapporto del riduttore e la curva della coppia del motore; il sottodimensionamento porta al surriscaldamento e al guasto prematuro.
- Per i sistemi CA con VFD, aggiungere reattori di linea o filtri per ridurre le armoniche e proteggere i componenti elettronici sensibili.
- Per i motori CC con spazzole, programmare le ispezioni delle spazzole e mantenere pulite le superfici del commutatore per evitare rumore elettrico e usura.
- Affrontare la lubrificazione e il gioco del cambio; scegliere la giusta viscosità del lubrificante per la temperatura di esercizio e i cicli di carico.
Considerazioni sui costi e costo totale di proprietà (TCO)
I confronti iniziali dei costi spesso favoriscono i motori CA per installazioni collegate alla rete ad alta potenza a causa del costo del motore inferiore per kW. Ma il TCO dipende dalle apparecchiature di controllo (VFD), dal consumo di energia, dagli intervalli di manutenzione e dal rischio di tempi di fermo. I sistemi DC possono essere più economici per progetti a bassa tensione o alimentati a batteria perché evitano la necessità di inverter e possono fornire una migliore efficienza a carico parziale in alcuni scenari.
Raccomandazioni pratiche e lista di controllo finale
- Se è disponibile l'alimentazione di rete e l'applicazione funziona a velocità costante, un motoriduttore CA è solitamente la scelta robusta ed economica.
- Se è necessaria una coppia precisa a bassa velocità, il funzionamento a batteria o una risposta dinamica rapida, optare per un motoriduttore CC (preferibilmente senza spazzole) con un driver appropriato.
- Dimensionare sempre la coppia continua con un margine di sicurezza, controllare i fattori di servizio del riduttore e convalidare le prestazioni termiche in cicli di lavoro reali.
Conclusione
I motoriduttori CA e CC hanno ciascuno punti di forza evidenti: i sistemi CA eccellono negli ambienti alimentati dalla rete e a servizio continuo con ecosistemi VFD maturi, mentre i sistemi CC eccellono laddove sono essenziali un'elevata coppia di avviamento, il controllo a bassa velocità o il funzionamento a batteria. La scelta migliore bilancia la disponibilità elettrica, la complessità del controllo, la capacità di manutenzione, gli obiettivi di efficienza e il costo totale del ciclo di vita. Utilizza l'elenco di controllo di selezione e la tabella di confronto sopra per abbinare la topologia del motore alla tua applicazione e convalida sempre le selezioni con test di carico reali e curve prestazionali del fornitore.

-
Feedback
Prodotti correlati










Copyright© Hengye Intelligent Drive (Hangzhou) Co., Ltd. Tutti i diritti riservati

Hotline:0086-15869193920
Time:0:00 - 24:00
